
General Motors złożyło wniosek patentowy dotyczący zdalnego sterowania pojazdem. Dokument US 2025/0377659 A1 trafił do Urzędu Patentowego i Znaków Towarowych USA 7 czerwca 2024 roku, a publikację opublikowano 11 grudnia 2025 roku. Jako twórców wskazano inżynierów GM pracujących w Stanach Zjednoczonych.
Opis patentowy przedstawia system do precyzyjnego zdalnego sterowania kierownicą, hamulcami, przyspieszeniem i przekładnią. Rozwiązanie celuje w sytuacje, gdzie liczy się dokładność: ciasne manewry, podjazdy i pochyłe nawierzchnie, czyli miejsca, w których drobne ruchy powinny przekładać się na przewidywalne zachowanie pojazdu.
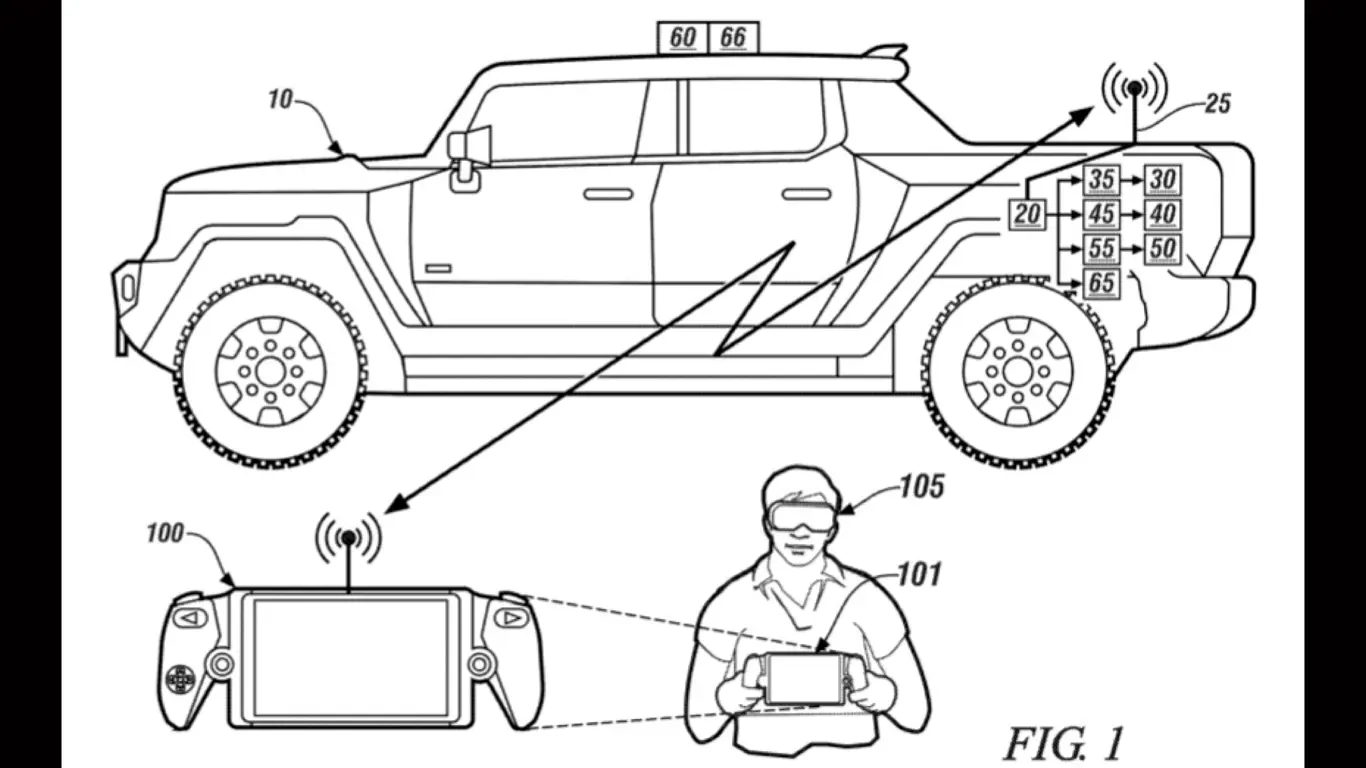
Kluczowym elementem jest przenośny kontroler z dwiema gałkami analogowymi, spustami, przełącznikami oraz modułem łączności. Sygnały z tego urządzenia trafiają do pokładowej elektroniki samochodu, która zamienia je na polecenia dla siłowników. Szczególny nacisk położono na sterowanie kierunkiem: ostateczny kąt skrętu wyliczany jest na podstawie sygnałów z obu gałek i map kalibracyjnych. Taki układ sugeruje koncentrację na płynności, a nie zero-jedynkowych reakcjach — podejście, które w praktyce często procentuje, gdy trzeba „przewlec” maszynę przez wąskie gardła bez nerwowych szarpnięć.
Patent przewiduje także wybieralne tryby pracy, pozycje neutralne dla elementów sterujących, funkcję zmiany kierunku oraz możliwość wyposażenia kontrolera w ekran lub sparowania go z zestawem VR. Zestaw funkcji wygląda na zaprojektowany tak, by operator miał pełniejszy obraz sytuacji i podejmował mniej decyzji na wyczucie, co zwykle przekłada się na większą pewność ruchów.
Według autorów rozwiązanie może znaleźć zastosowanie przy manewrach z małą prędkością, w sprzęcie przemysłowym i rolniczym oraz w strefach niebezpiecznych. Takie możliwości mogą być także pożądane w wojskowych pojazdach, gdzie wymagana jest praca zdalna bez kierowcy na pokładzie.









